Implementation
1. Cholesky decomposition
The Cholesky decomposition of a Hermitian positive-definite matrix $\mathbf{A}$ is
with $L$ a lower triangular matrix .
2. Solving and computing with Cholesky decomposition
2.a. Solve $A x = b$ for $x$
Solve $A x = b$ for $x$ knowing that $A = LL^T$, with $L$ a lower triangular matrix.
We write $\alpha = L^T x$.
- Solve $L \alpha = b$ for $\alpha$ by forward substitution.
- Solve $L^T x = \alpha$ for $x$ by backward substitution.
2.b. Compute $H^T A^{-1} H$
Compute $H^T A^{-1} H$ knowing that $A = LL^T$, with $L$ a lower triangular matrix.
with $v = L^{-1}H$
- Solve $Lv = H$ for $v$ by forward substitution.
- Compute the crossproduct $v^Tv$.
2.c. Compute $K_\star^T K^{-1} y$
Compute $K_\star^T K^{-1} y$ knowing that $K_\star$ and $K$ are positive-definite, and $K = LL^T$ with $L$ a lower triangular matrix.
with $b = L^{-1}K_\star$ and $a = L^{-1}y$
- Solve $Lb = K_\star$ for $b$ by forward substitution.
- Solve $La = y$ for $a$ by forward substitution.
- Compute the cross-product $b^Ta$!
3. Predictions and log marginal likelihood for Gaussian process regression
See book of Rasmussen and Williams (2006), chap. 2, page 19.
Predictive mean: $\bar{f_\star} = K_\star^T (K + \sigma^2 I)^{-1}y$
Predictive variance: $Var(f_\star) = K_{\star\star}^T - K_\star^T (K + \sigma^2 I)^{-1}K_\star$
Algorithm of Rasmussen and Williams (2006):
- $L \leftarrow \text{cholesky}(K + \sigma^2 I)$
- $\alpha \leftarrow L^T(L\y)$
- $\bar{f_\star} \leftarrow K_\star^T \alpha$
- $v \leftarrow L\K_\star$
- $Var(f_\star) \leftarrow K_{\star\star} - v^T v$
- $\log(p(y\mid X)) \leftarrow -\frac{1}{2} y^T \alpha - \sum_i \log L_{ii} - \frac{n}{2}\log 2\pi$
Algorithm of GauProMod, file GPpred.cpp (note that here we write $K$ for $(K + \sigma^2 I)$):
- Compute $L$ with the cholesky decomposition, i.e.,
L = K.llt().matrixL()); - We compute $b^T = (L^{-1}K_\star)^T$ by solving $L^Tb^T = K_\star^T$ for $b^T$ (see Section 2.c.1)
bt = (L.triangularView<Lower>().solve(Kstar)).adjoint(); - We compute $a = L^{-1}y$ by solving $La = y$ for $a$ (see Section 2.c.2)
a = L.triangularView<Lower>().solve(y); - We compute the mean of the Gaussian process: $\bar{f_\star} = b^Ta = K_\star^T K^{-1}y$
M = bt * a; - We compute $K_\star^T (K + \sigma^2 I)^{-1}K_\star = v^T v$ (see Section 2.b)
btb = MatrixXd(kk,kk).setZero().selfadjointView<Lower>().rankUpdate(bt); - We compute the covariance of the Gaussian process: $Var(f_\star) = K_{\star\star}^T - K_\star^T (K + \sigma^2 I)^{-1}K_\star$
C = Kstarstar - vtv;
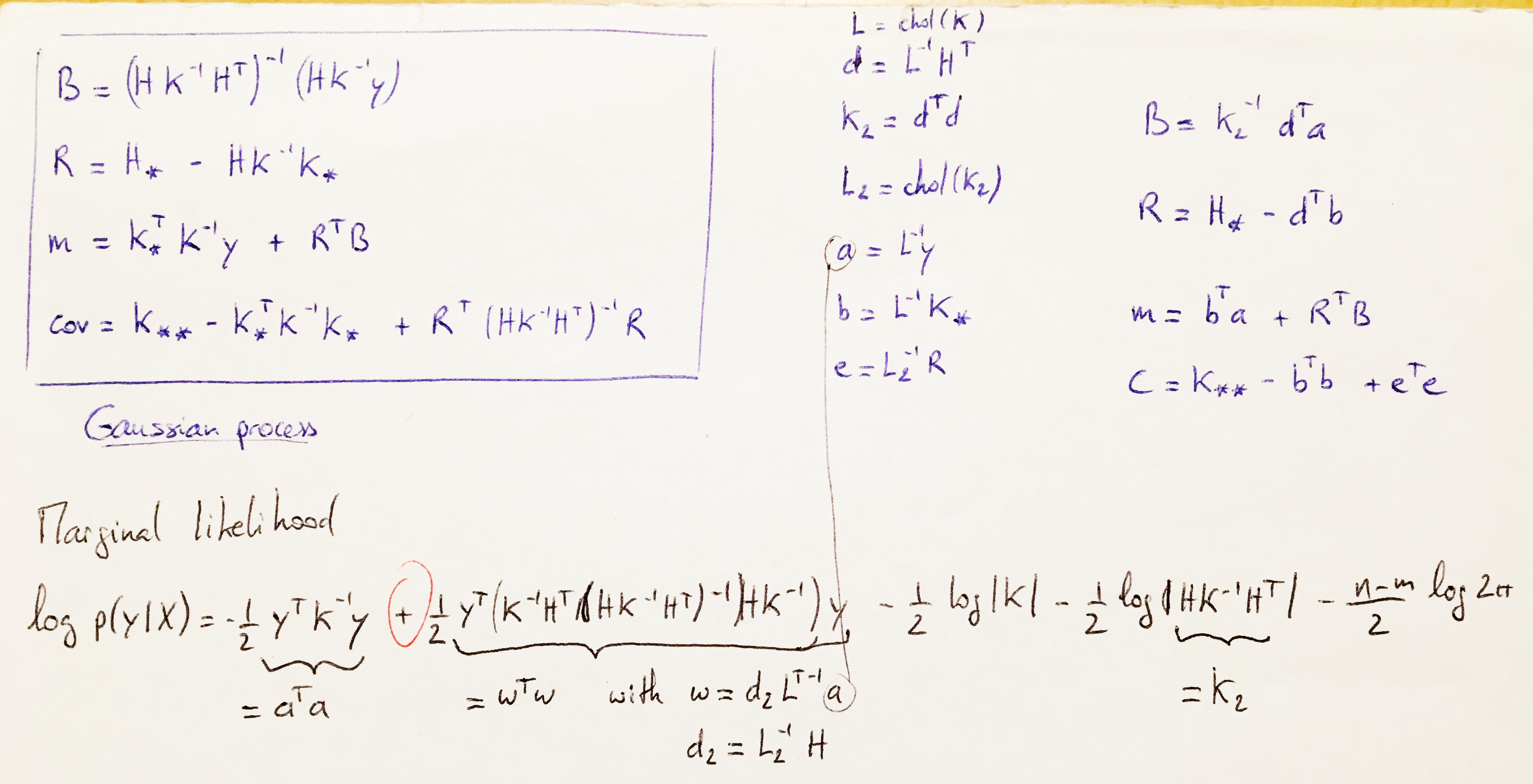
4. Predictions and log marginal likelihood for Gaussian process regression with explicit basis functions
See book of Rasmussen and Williams (2006), chap. 2.7, page 27-29.
Algorithm of GauProMod, file GPpredmean.cpp:
See my notes…
5. Log determinant of positive definite matrices
Knowing that:
-
Cholesky decomposition of positive definite matrix $\mathbf{A}$
-
determinant of a positive definite matrix $\mathbf{A}$:
-
log rule
-
determinant of a lower triangular matrix
the log determinant of positive definite matrices is:
Thus to calculate the log determinant of a symmetric positive definite matrix in R:
L <- chol(A)
logdetA <- 2*sum(log(diag(L)))
6. Determinant od the exponential of a matrix $\mathbf{B}$
See the proof here